
天文摄影(6)
又到了天文摄影时间,就让我来给大家揭晓上次几个问题的答案吧。
既然我们拍摄到的照片每个像素只有一种颜色的信息(R红、G绿、B蓝),我们没办法知道此像素其他颜色的信息。我们能用的只有两种方法:方法一,去猜其他颜色的信息,就像我上次举得线性差值的例子一样,对于这种方法,我们为了得到尽可能真实的信息,就需要设计出更好的差值算法(这种算法其实也是各个相机品牌竞争中的一个商业机密,更好的算法意味着更真实好看的色彩,也就意味着有更多的购买者);方法二,将四个像素看成一组,这样这4个像素就拥有了一整套RGB信息,也就可以形成一张彩色照片了。这两种方法的优劣也很明显,第一种方法因为是通过算法猜测,所以得到的图片虽然保留了与之前照片相同的分辨率,但是没有真实的颜色那么鲜艳,看起来好像退了色一样;第二种方法正好和它相反,颜色可以很鲜艳,但是分辨率却只是原来的1/4。
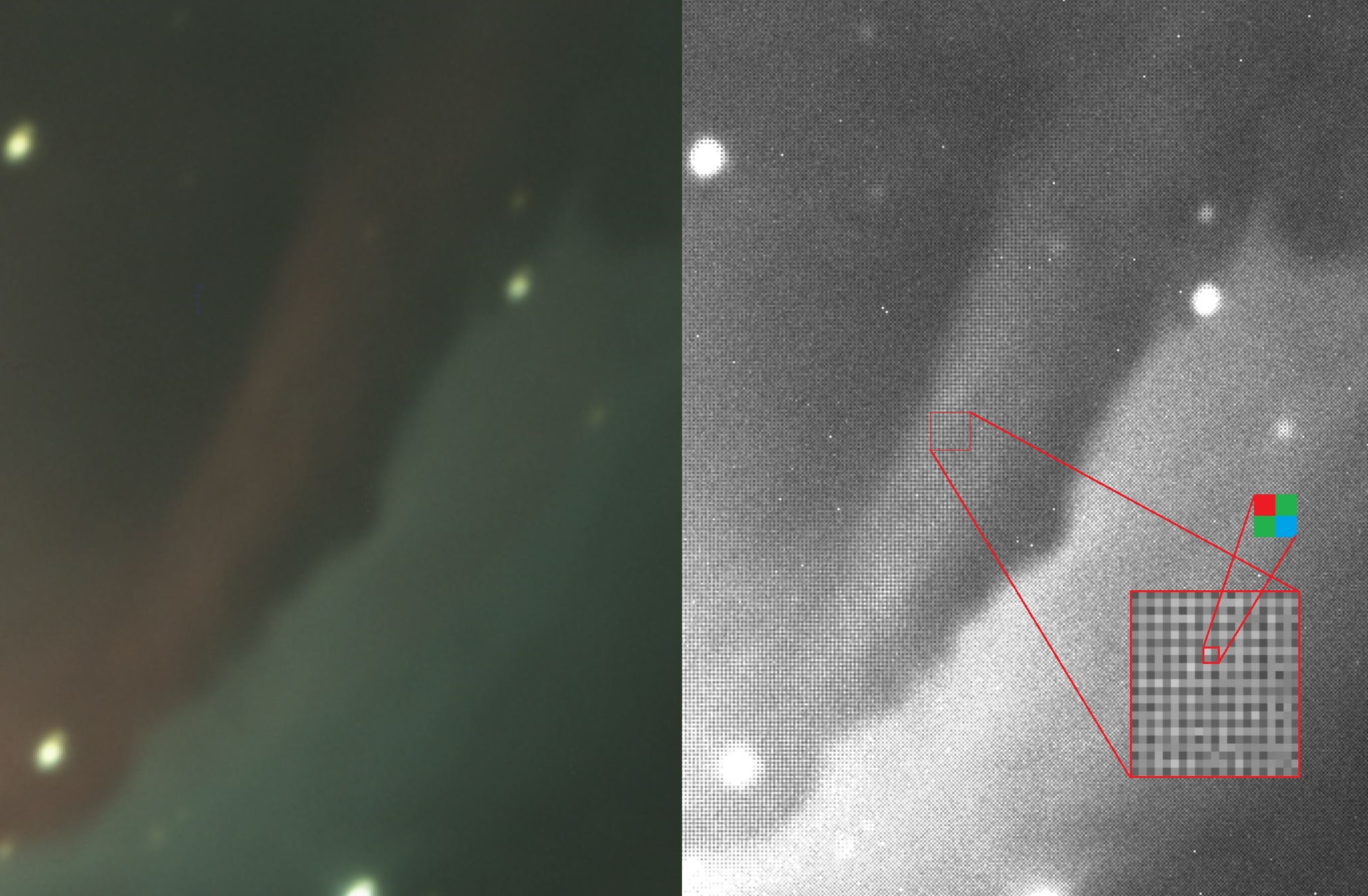
这张图是通过彩色cmos相机拍摄到的猎户座大星云(M42)的图片,可以很明显的看到照片中有网格状的结构,这就是因为同一块地区,虽然总体亮度相近,但是其在R、G、B的亮度不同(比如一个红色的星云,R滤镜的像素就会比GB滤镜的像素亮得多)
所以彩色相机天生就比黑白相机有劣势了么?就没有弥补的方式么?当然不是,既然每个像素一次只能拍摄一种颜色的信息,那么我可以通过移动相机位置,分三次,每次用不同滤镜颜色的像素拍摄这个地方呀,这样把三次拍摄的照片叠加起来,就相当于黑白相机用RGB滤镜拍摄了。虽然理论上是这样的,而且也是可以实现的,但是对跟踪系统有很大的要求,虽然爱好者所用的赤道仪理论上大多可以满足那样的精度。

(我们可以利用软件计算一下,一个普通的单反相机,像素在3微米以上,在600mm焦距的望远镜下,1个像素对应天空1角秒以上的范围)
但是因为风、极轴误差、跟踪周期误差等因素的存在,让这个标准不再那么好达到,所以在真正应用中,我们可以通过拍摄多张照片来达到以上目的,随着照片数量的增多,总能把缺少信息的地方填满的。
利用以上相同的原理,我们还可以解决因像素过大,相机分辨率比望远镜理论分辨率低的问题。那么具体怎么做的呢?就让我在这里卖个关子,先不告诉大家,留给大家好好思考思考。下次我会用开头的一点点篇幅来解释一下,那么我们下个月不见不散~


